Betaflight adalah sebuah firmware (perangkat lunak sistem operasi) (bisa kamu download dan cek disini) yang digunakan pada drone, khususnya drone yang menggunakan kontrol penerbangan berbasis flight controller. Betaflight terkenal di kalangan penggemar dan pembuat drone, terutama bagi mereka yang terlibat dalam kegiatan balapan drone (FPV racing) atau penerbangan drone yang membutuhkan performa tinggi dan kontrol presisi. Dalam artikel ini, kita akan membahas lebih dalam tentang Betaflight, fungsinya, dan bagaimana cara kerjanya.
Sejarah Betaflight
Betaflight awalnya merupakan hasil pengembangan dari Cleanflight, sebuah firmware yang juga digunakan pada kontrol penerbangan drone. Cleanflight sendiri merupakan fork dari Baseflight, yang dikembangkan oleh komunitas open-source untuk mengontrol perangkat keras pada drone. Seiring dengan perkembangan dan kebutuhan untuk fitur lebih canggih, Betaflight muncul dengan penambahan fitur-fitur yang lebih dinamis, lebih banyak opsi konfigurasi, dan peningkatan performa.
Sejak diluncurkan, Betaflight semakin populer karena keandalannya dan kemampuannya dalam memberikan kontrol penerbangan yang sangat responsif, serta dukungannya terhadap berbagai jenis perangkat keras yang digunakan dalam dunia drone.
Fitur Utama Betaflight
Kontrol Penerbangan Presisi
Betaflight memberikan kontrol yang sangat responsif terhadap gerakan drone, yang sangat penting untuk kegiatan balapan atau penggunaan drone dalam pengambilan gambar yang membutuhkan kestabilan tinggi.
Konfigurasi yang Fleksibel
Salah satu keunggulan Betaflight adalah kemampuannya untuk disesuaikan dengan berbagai preferensi pengguna. Dengan berbagai opsi konfigurasi, pengguna dapat menyesuaikan pengaturan seperti sensitivitas kontrol, pengaturan motor, dan pengaturan stabilisasi penerbangan.
Dukungan untuk Berbagai Perangkat Keras
Betaflight mendukung beragam perangkat keras, termasuk berbagai jenis flight controllers, sensor, dan perangkat periferal. Hal ini menjadikannya sangat fleksibel dan dapat digunakan oleh berbagai kalangan pengguna, dari pemula hingga profesional.
Mode Penerbangan yang Beragam
Betaflight memiliki beberapa mode penerbangan yang dapat dipilih sesuai kebutuhan, seperti mode Acro (untuk manuver bebas), Angle (untuk kestabilan otomatis), dan Horizon (kombinasi antara Acro dan Angle). Mode-mode ini memberikan pilihan kontrol penerbangan yang lebih luas, dari yang paling dasar hingga yang paling canggih.
Anti-Flip dan Peningkatan Stabilitas
Fitur angle mode pada Betaflight membantu menjaga kestabilan drone dan mencegah drone terbalik saat terbang. Ini sangat membantu bagi pengguna pemula yang belum terbiasa dengan kontrol manual.
Telemetry dan Pengaturan Jarak Jauh
Betaflight mendukung integrasi dengan sistem telemetry untuk memantau status penerbangan secara real-time, termasuk tegangan baterai, suhu, dan parameter penting lainnya. Hal ini memungkinkan pengguna untuk mendapatkan data penerbangan langsung, yang sangat berguna untuk balapan atau penerbangan jarak jauh.
Cara Kerja Betaflight
Betaflight berfungsi dengan cara mengatur berbagai perangkat keras yang ada pada drone, seperti flight controller, sensor, dan motor. Ketika drone terbang, Betaflight mengolah input dari sensor seperti akselerometer, giroskop, dan barometer untuk menyeimbangkan drone dalam penerbangan.
Pada saat yang sama, pengguna bisa mengontrol drone menggunakan remote kontrol. Betaflight akan memproses input dari remote untuk mengatur kecepatan motor, arah gerakan, serta menjaga kestabilan drone melalui algoritma penerbangan canggih.
Betaflight Configurator
Untuk mengonfigurasi dan menyesuaikan pengaturan Betaflight, pengguna dapat menggunakan Betaflight Configurator, sebuah aplikasi berbasis desktop yang memungkinkan pengguna untuk terhubung ke flight controller melalui kabel USB dan melakukan berbagai pengaturan.
Betaflight Configurator menyediakan berbagai alat, termasuk grafik untuk memantau status penerbangan, pengaturan kontrol motor, pengaturan PID (proportional-integral-derivative) untuk pengendalian kestabilan, dan banyak lagi. Dengan alat ini, pengguna dapat menyempurnakan pengaturan penerbangan untuk mendapatkan performa optimal sesuai dengan kebutuhan mereka.
Kenapa Betaflight Populer?
Performa Tinggi
Betaflight dikenal dengan performa penerbangan yang sangat baik, terutama untuk drone yang digunakan dalam balapan FPV (First-Person View). Responsifitas tinggi, kestabilan yang luar biasa, dan fleksibilitas dalam pengaturan membuatnya menjadi pilihan utama bagi para pembalap drone.
Komunitas yang Besar dan Aktif
Sebagai proyek open-source, Betaflight didukung oleh komunitas besar yang terus mengembangkan fitur baru, memperbaiki bug, dan memberikan dukungan kepada pengguna. Forum diskusi dan tutorial di berbagai platform memungkinkan pengguna untuk terus belajar dan mengembangkan keterampilan mereka dalam menggunakan Betaflight.
Dukungan Terhadap Teknologi Terbaru
Betaflight terus berinovasi dan menambahkan dukungan terhadap teknologi terbaru, seperti GPS, sensor baru, dan sistem komunikasi terbaru. Hal ini memastikan bahwa pengguna selalu mendapatkan pengalaman terbaik saat menggunakan Betaflight.
Kesimpulan
Betaflight adalah firmware yang sangat kuat dan fleksibel untuk pengendalian drone. Dengan berbagai fitur yang memudahkan pengguna untuk menyesuaikan pengaturan dan meningkatkan kinerja penerbangan, Betaflight telah menjadi pilihan utama bagi para penggemar drone, khususnya di kalangan pembalap drone FPV. Dukungan komunitas yang aktif serta pembaruan yang rutin menjadikannya terus berkembang dan memberikan pengalaman terbang yang lebih baik bagi penggunanya.
Flight controller apa yang bisa menggunakan betaflight?
Betaflight dapat digunakan dengan berbagai jenis flight controller (FC) yang mendukung perangkat keras dan fitur-fitur yang diperlukan untuk menjalankan firmware ini. Flight controller adalah otak dari drone, yang bertanggung jawab untuk mengendalikan motor, kestabilan, dan respons penerbangan berdasarkan input dari sensor dan remote kontrol.
Berikut adalah beberapa flight controller yang umum digunakan dengan Betaflight:
1. Omnibus F4
Omnibus F4 adalah salah satu flight controller yang sangat populer di kalangan pengguna Betaflight. Dengan prosesor F4 dan berbagai port I/O, flight controller ini dapat menangani berbagai sensor dan perangkat periferal yang diperlukan untuk penerbangan stabil dan responsif. Omnibus F4 mendukung berbagai fitur Betaflight seperti pengaturan PID, OSD, dan telemetry.
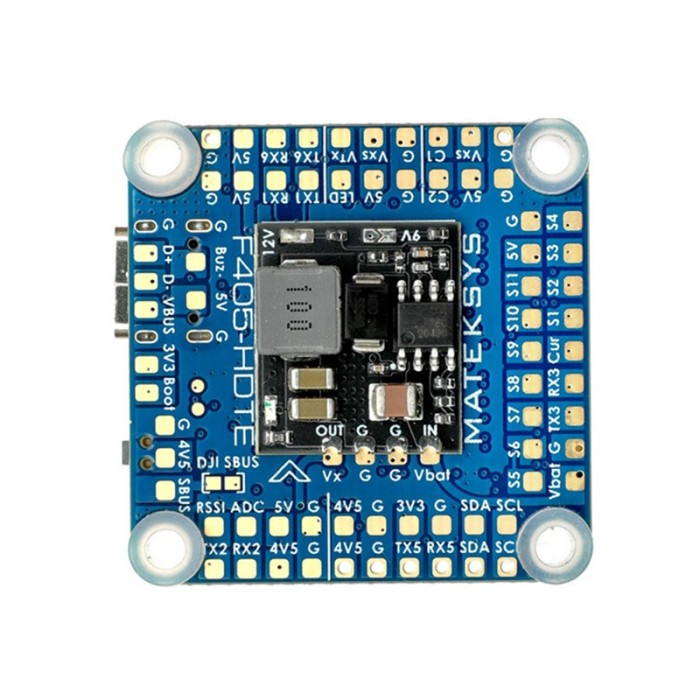
2. MATEKF405
MATEKF405 adalah flight controller berbasis prosesor F4 yang sangat cocok untuk penggunaan Betaflight, terutama untuk drone FPV. FC ini memiliki port USB, barometer, dan dukungan untuk berbagai sensor eksternal. MATEKF405 juga dikenal karena kemampuannya dalam memberikan kestabilan penerbangan yang baik dan fleksibilitas dalam pengaturan.
3. Kiss FC
Meskipun lebih dikenal dengan firmware KISS, Kiss FC juga dapat diprogram untuk menggunakan Betaflight. Beberapa model Kiss FC menyediakan fitur dan kestabilan penerbangan yang sangat baik, dan dapat dipilih jika pengguna ingin menggabungkan performa dari firmware Betaflight dengan perangkat keras KISS.
4. SP Racing F3
SP Racing F3 adalah salah satu flight controller klasik yang masih digunakan oleh banyak penggemar drone. FC ini dapat digunakan dengan Betaflight dan menawarkan banyak pengaturan fleksibel yang sangat berguna dalam manuver drone, terutama untuk drone racing.
5. Betaflight F4
Betaflight F4 adalah flight controller yang dirancang khusus untuk Betaflight, dengan prosesor F4 yang kuat dan berbagai port I/O. FC ini ideal untuk penggunaan pada drone yang membutuhkan pengendalian presisi, seperti drone balap atau drone yang digunakan dalam FPV.
6. Holybro Kakute F7
Holybro Kakute F7 adalah flight controller berbasis prosesor F7 yang juga mendukung Betaflight. Dengan kemampuan pemrosesan yang lebih cepat dan lebih banyak port I/O dibandingkan F4, Kakute F7 menawarkan performa yang lebih tinggi dan stabilitas penerbangan yang sangat baik, bahkan untuk penggunaan drone yang lebih kompleks.
7. DiY RC F7
Flight controller DiY RC F7 adalah pilihan solid lainnya untuk digunakan dengan Betaflight. Berbasis prosesor F7, DiY RC F7 memiliki lebih banyak kapasitas pemrosesan untuk menangani beban kerja dari berbagai sensor dan perangkat tambahan seperti GPS atau OSD. FC ini sangat berguna untuk drone dengan kebutuhan penerbangan yang lebih canggih.
8. CL Racing F7
CL Racing F7 adalah flight controller berbasis prosesor F7 yang dirancang untuk memberikan stabilitas dan performa tinggi. Dengan berbagai fitur canggih, termasuk dukungan untuk GPS dan lebih banyak port I/O, flight controller ini sangat cocok untuk penggunaan Betaflight.
9. T-Motor F7
T-Motor F7 adalah flight controller berbasis prosesor F7 yang menawarkan kecepatan pemrosesan tinggi dan kemampuan pemrograman yang fleksibel. Dengan berbagai pilihan port I/O dan dukungan untuk sensor tambahan, T-Motor F7 merupakan pilihan yang solid untuk penerbangan presisi dan racing.
10. HGLRC F4/F7
HGLRC juga memproduksi flight controller berbasis F4 dan F7 yang kompatibel dengan Betaflight. Flight controller HGLRC memiliki desain yang efisien dan kemampuan untuk mendukung berbagai perangkat keras, termasuk OSD dan sensor tambahan.
11. BrainFPV Radix 2
BrainFPV Radix 2 adalah flight controller premium yang dirancang untuk penerbangan presisi tinggi. Dikenal dengan algoritma penerbangan yang sangat baik dan kemampuan untuk menangani pengaturan yang lebih kompleks, Radix 2 sangat cocok untuk pengguna Betaflight yang menginginkan kontrol penerbangan yang sangat responsif.
12. RacerStar F4
RacerStar F4 adalah flight controller berbasis F4 yang lebih terjangkau namun tetap mendukung fitur-fitur Betaflight seperti kontrol PID, OSD, dan telemetry. FC ini ideal untuk pengguna yang menginginkan pilihan harga lebih rendah tetapi tetap menginginkan performa yang solid.
Ciri-ciri Flight Controller yang Kompatibel dengan Betaflight
- Prosesor: Betaflight bekerja dengan flight controller yang menggunakan prosesor berbasis STM32, seperti STM32F3, STM32F4, atau STM32F7.
- Port I/O: Untuk dapat menggunakan berbagai perangkat tambahan seperti GPS, OSD, dan telemetry, flight controller harus memiliki port I/O yang cukup.
- Sensor: Flight controller harus dapat mendukung berbagai sensor seperti giroskop, akselerometer, barometer, dan kompas untuk menjaga kestabilan penerbangan.
- Konektivitas: Flight controller yang kompatibel dengan Betaflight biasanya memiliki konektivitas USB untuk memudahkan konfigurasi menggunakan Betaflight Configurator.
Kesimpulan
Betaflight mendukung banyak jenis flight controller yang dapat dipilih sesuai dengan kebutuhan pengguna, dari yang sederhana hingga yang lebih kompleks. Flight controller seperti Omnibus F4, MATEKF405, dan Holybro Kakute F7 merupakan beberapa pilihan populer di kalangan pengguna Betaflight, tergantung pada tujuan penggunaan, anggaran, dan preferensi perangkat keras. Pemilihan flight controller yang tepat akan sangat memengaruhi performa dan stabilitas drone dalam penerbangan, terutama untuk kegiatan seperti balapan drone atau pengambilan gambar udara yang membutuhkan ketelitian tinggi.






















.jpg)






